这篇文章主要聚焦一下各种奇奇怪怪的树查询算法。虽然我主要关注最近邻检索的图方法,但是因为很多图方法实际上都使用了各种 tree 作为辅助索引,所以有必要简单了解一下所有的树查询算法。
有请第一位 受害者 。
# KD 树
kd 树算是用的很广泛的一种最近邻检索树了,它的思想实际上和二叉搜索树很像。
看这张图就够了:
首先思考动机,为什么我们需要构建 KD 树?树结构是一种非常高效的数据结构,对于二叉搜索树,它的查询复杂度只有 h,也就是 log (n)。如果直接暴力检索最近邻,那么复杂度会是 n。
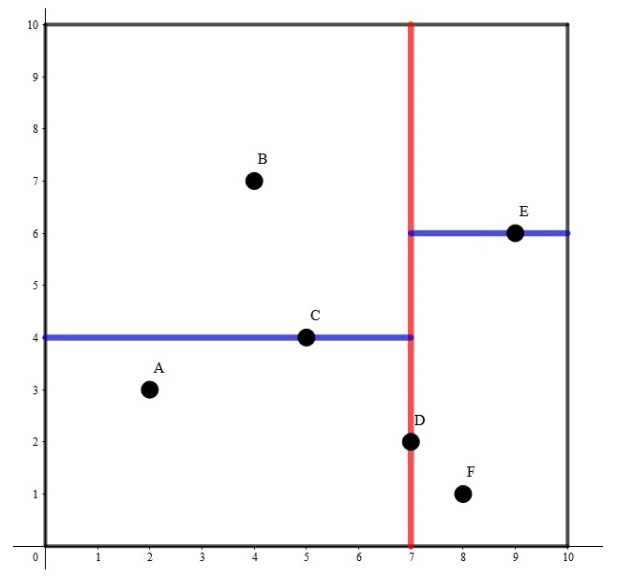
KD 树是什么?与搜索二叉树类似,通过比较数据,把大于当前节点的数据插入到树右侧,把小于节点的数据放到左侧。而 KD 树比较大小是在不同维度进行的。
例如,对于当前节点 root。我们比较所有数据点(p ) 在维度 0 的数据,对于某个向量 [1.1,3.4,...,0.1] 在 dim=0 的数据即 1.1,如果 1.1 小于 root(dim=0),那么就把这个向量插入到左侧,如果小于就插入到右侧。同样在 KD 树下一层,我们比较 dim=1 的数据,按照同样方式进行插入。
一个很重要的优化方式就是,我们要保证 KD 树左右两边数据点数量差不多,这样进行插入时候可以保证得到的 KD 树尽可能平衡。于是我们构建 KD 树时候选择当前点集在当前维度下处于 中位数 的那个点作为 base,然后比较插入。
第二个优化的点,维度选择。我们尽量选择数据分布方差很大的维度。
所以构建方法:
假设我们已经知道了 维空间内的 个不同的点的坐标,要将其构建成一棵 k-D Tree,步骤如下:
- 若当前超长方体中只有一个点,返回这个点。
- 选择一个维度,将当前超长方体按照这个维度分成两个超长方体。
- 选择切割点:在方差大的维度上选择中位数那个点,这一维度上的值小于这个点的归入一个超长方体(左子树),其余的归入另一个超长方体(右子树)。
- 将选择的点作为这棵子树的根节点,递归对分出的两个超长方体构建左右子树,维护子树的信息。
这里定义可以参考:https://oi-wiki.org/ds/kdt/
代码实现我看的是:https://github.com/crvs/KDTree
构建树的算法:
KDNodePtr KDTree::make_tree(const pointIndexArr::iterator &begin, // | |
const pointIndexArr::iterator &end, // | |
const size_t &length, // | |
const size_t &level // | |
) { | |
if (begin == end) { | |
return NewKDNodePtr(); // empty tree | |
} | |
size_t dim = begin->first.size(); | |
if (length > 1) { | |
sort_on_idx(begin, end, level); // 类似于快排,就是把中位数放到正确的位置,同时左边的数都比他小,右边的数都比中位数大 | |
} | |
auto middle = begin + (length / 2); | |
auto l_begin = begin; | |
auto l_end = middle; | |
auto r_begin = middle + 1; | |
auto r_end = end; | |
size_t l_len = length / 2; | |
size_t r_len = length - l_len - 1; | |
KDNodePtr left; | |
if (l_len > 0 && dim > 0) { | |
left = make_tree(l_begin, l_end, l_len, (level + 1) % dim); | |
} else { | |
left = leaf; | |
} | |
KDNodePtr right; | |
if (r_len > 0 && dim > 0) { | |
right = make_tree(r_begin, r_end, r_len, (level + 1) % dim); | |
} else { | |
right = leaf; | |
} | |
// KDNode result = KDNode(); | |
return std::make_shared< KDNode >(*middle, left, right); | |
} |
他的代码没有用到第二个优化,选择划分的 dim 只是简单的递增取模。
查询算法:
KDNodePtr KDTree::nearest_( // | |
const KDNodePtr &branch, // | |
const point_t &pt, // | |
const size_t &level, // | |
const KDNodePtr &best, // | |
const double &best_dist // | |
) { | |
double d, dx, dx2; | |
if (!bool(*branch)) { // 走到了一个叶子结点 | |
return NewKDNodePtr(); // basically, null | |
} | |
point_t branch_pt(*branch); // 之间重载了操作符 () | |
size_t dim = branch_pt.size(); | |
d = dist2(branch_pt, pt); | |
dx = branch_pt.at(level) - pt.at(level); | |
dx2 = dx * dx; | |
KDNodePtr best_l = best; | |
double best_dist_l = best_dist; | |
if (d < best_dist) { | |
best_dist_l = d; | |
best_l = branch; | |
} | |
size_t next_lv = (level + 1) % dim; | |
KDNodePtr section; | |
KDNodePtr other; | |
// select which branch makes sense to check | |
if (dx > 0) { | |
section = branch->left; | |
other = branch->right; | |
} else { | |
section = branch->right; | |
other = branch->left; | |
} | |
// keep nearest neighbor from further down the tree | |
KDNodePtr further = nearest_(section, pt, next_lv, best_l, best_dist_l); | |
if (!further->x.empty()) { //best_l 实际上是一个指针,这一步 check 并没有必要。 | |
double dl = dist2(further->x, pt); | |
if (dl < best_dist_l) { | |
best_dist_l = dl; | |
best_l = further; | |
} | |
} | |
// only check the other branch if it makes sense to do so | |
if (dx2 < best_dist_l) { // 说明 other 这个 branch 也有可能能够找到最近邻 | |
further = nearest_(other, pt, next_lv, best_l, best_dist_l); | |
if (!further->x.empty()) { | |
double dl = dist2(further->x, pt); | |
if (dl < best_dist_l) { | |
best_dist_l = dl; | |
best_l = further; | |
} | |
} | |
} | |
return best_l; | |
}; |
查询的思想也和二叉树更类似,不多赘述。
# ball tree
ball tree 的思想更简单了。
将当前点集的质心作为 root,搜索离当前质心最远的节点 p,搜索离节点 p 最远的节点 q。通过 p,q 将当前点集进行划分为两个 cluster,看点离 p,q 哪个更近,如果离 p 更近就加入 p cluster,如果离 q 更近就加入 q cluster。反复迭代,知道到达最大深度。

首先取灰色的点作为 root,用 3 和 9 来划分两个 cluster。然后递归进行划分。

# VP treee
这里有一篇文章,对于我理解 VP tree 有很大帮助:http://stevehanov.ca/blog/?id=130
so,what is vp tree?

对于每一个节点 p,我们设置一个半径 r,把和该节点距离小于 r 的所有点插入到节点的左子树,把距离大于 r 的所有点插入到右子树。实际代码中,我们取点集中位数之前的所有点作为左子树,中位数之后的点作为右子树。
查询时候,需要去确定向左还是向右去查询。

如果查询的点 x 在当前也就是距离小于 tau,把当前 p 加入到 result 中(因为需要查 k 个最近邻), tau 始终等于结果 result 中距离 x 的最大距离。
因为 x 在圆内,于是我们向左子树进行查询,蓝色的点,就是我们在左子树中查询得到的点,并且更新得到了 tau。
如果 tau > distance to shell,说明外部还可能有节点,需要向右子树进行查询。

#include <stdlib.h> | |
#include <algorithm> | |
#include <vector> | |
#include <stdio.h> | |
#include <queue> | |
#include <limits> | |
template<typename T, double (*distance)( const T&, const T& )> | |
class VpTree | |
{ | |
public: | |
VpTree() : _root(0) {} | |
~VpTree() { | |
delete _root; | |
} | |
void create( const std::vector& items ) { | |
delete _root; | |
_items = items; | |
_root = buildFromPoints(0, items.size()); | |
} | |
void search( const T& target, int k, std::vector* results, | |
std::vector<double>* distances) | |
{ | |
std::priority_queue<HeapItem> heap; | |
_tau = std::numeric_limits::max(); | |
search( _root, target, k, heap ); | |
results->clear(); distances->clear(); | |
while( !heap.empty() ) { | |
results->push_back( _items[heap.top().index] ); | |
distances->push_back( heap.top().dist ); | |
heap.pop(); | |
} | |
std::reverse( results->begin(), results->end() ); | |
std::reverse( distances->begin(), distances->end() ); | |
} | |
private: | |
std::vector<T> _items; | |
double _tau; | |
struct Node | |
{ | |
int index; | |
double threshold; | |
Node* left; | |
Node* right; | |
Node() : | |
index(0), threshold(0.), left(0), right(0) {} | |
~Node() { | |
delete left; | |
delete right; | |
} | |
}* _root; | |
struct HeapItem { | |
HeapItem( int index, double dist) : | |
index(index), dist(dist) {} | |
int index; | |
double dist; | |
bool operator<( const HeapItem& o ) const { | |
return dist < o.dist; | |
} | |
}; | |
struct DistanceComparator | |
{ | |
const T& item; | |
DistanceComparator( const T& item ) : item(item) {} | |
bool operator()(const T& a, const T& b) { | |
return distance( item, a ) < distance( item, b ); | |
} | |
}; | |
Node* buildFromPoints( int lower, int upper ) | |
{ | |
if ( upper == lower ) { | |
return NULL; | |
} | |
Node* node = new Node(); | |
node->index = lower; | |
if ( upper - lower > 1 ) { | |
// choose an arbitrary point and move it to the start | |
int i = (int)((double)rand() / RAND_MAX * (upper - lower - 1) ) + lower; | |
std::swap( _items[lower], _items[i] ); | |
int median = ( upper + lower ) / 2; | |
// partitian around the median distance | |
std::nth_element( | |
_items.begin() + lower + 1, | |
_items.begin() + median, | |
_items.begin() + upper, | |
DistanceComparator( _items[lower] )); | |
// what was the median? | |
node->threshold = distance( _items[lower], _items[median] ); | |
node->index = lower; | |
node->left = buildFromPoints( lower + 1, median ); | |
node->right = buildFromPoints( median, upper ); | |
} | |
return node; | |
} | |
void search( Node* node, const T& target, int k, | |
std::priority_queue& heap ) | |
{ | |
if ( node == NULL ) return; | |
double dist = distance( _items[node->index], target ); | |
//printf("dist=%g tau=%gn", dist, _tau ); | |
if ( dist < _tau ) { | |
if ( heap.size() == k ) heap.pop(); | |
heap.push( HeapItem(node->index, dist) ); | |
if ( heap.size() == k ) _tau = heap.top().dist; | |
} | |
if ( node->left == NULL && node->right == NULL ) { | |
return; | |
} | |
if ( dist < node->threshold ) { | |
search( node->left, target, k, heap ); | |
if ( dist + _tau >= node->threshold ) { // 说明外部还有可能有节点。 | |
search( node->right, target, k, heap ); | |
} | |
} else { | |
search( node->right, target, k, heap ); | |
if ( dist - _tau <= node->threshold ) { | |
search( node->left, target, k, heap ); | |
} | |
} | |
} | |
}; |
# Brute Force
说白了就是暴力检索。